

Ministère de l’Enseignement Supérieur de la Recherche Scientifique et de Techno
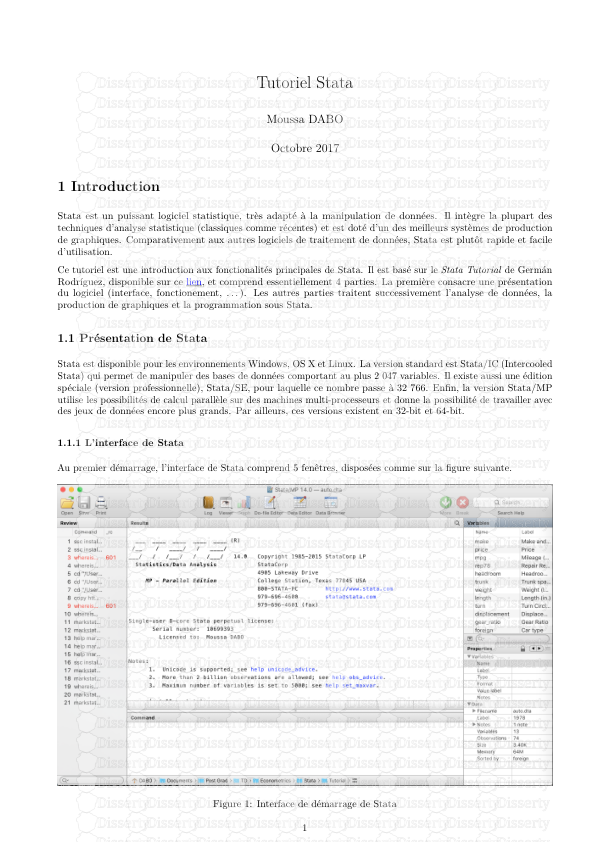
Ministère de l’Enseignement Supérieur de la Recherche Scientifique et de Technologie Université de Gabès Ecole Nationale d’Ingénieurs de Gabès Département de Génie Electrique-Automatique Réalisé par BEN MABROUK Zaineb ABID Aicha C Co om mm ma an nd de e R Ro ob bu us st te e d d’ ’u un n M Mo ot te eu ur r à à C Co ou ur ra an nt t C Co on nt ti in nu u Encadrés par : Mr. SBITA Lassaâd & Mlle. BEN HAMED Mouna Soutenue le 2 Juillet 2007 devant le jury : Président : Mr. Feki Moez Membres : Mr. Kraiem Habib Mr. SBITA Lassaâd Invitée : Mlle. BEN HAMED Mouna Année universitaire : 2006/2007 Route de Mednine -6029- Gabés tel : 75 392 100 Fax : 75 392 190 Dédicace A mes parents que j’aime A mes sœurs adorables A mes frères A tous ceux qui me sont chers Ben Mabrouk ZAINEB Dédicace A mes chers parents, mes frères et mes soeurs, A toute ma famille, A tous mes amis, A tous ceux qui m’ont aidé de prés ou de loin, je vous dédie ce modeste travail fruit de mes années d’étude. Abid AICHA Remerciement Nous adressons nos vifs remerciements à tous ceux qui ont contribué de près ou de loin d’achever ce travail dans les bons sens. Nous portons nos profondes gratitudes à nos encadreurs Mr SBITA Lassaàd Maître assistant à l’ENIG et MLLe Ben Hamed Mouna assistante à l’ENIG Pour l’aide déterministe et le sérieux qu’ils nous ont accordé et pour l’intérêt qu’ils ont porté à notre projet. Nous tenons également à remercier Mr Feki Moez et Mr Kraiem Habib assistant à l’ENIG pour avoir accepter de juger notre présent travail. SOMMAIRE Nomenclature…………………………………………………………………………...7 Introduction Générale……………………………………………………………..…..8 CHAPITRE I MODELISATION DE LA MACHINE COURAN CONTINU I. Introduction……………………………………...…………………………………...10 II. Structure de la machine à courant continu……………..…....................................10 III. Caractéristique de fonctionnement……………………...………………………...11 III. 1 Force électromotrice…………………………………………………….....11 III. 2 Fonctionnement de la machine à courant continu……………………….....11 III.2.1 fonctionnement en génératrice……………………………………11 III. 2. 2 Fonctionnement en moteur………………………………...……12 III. 3 Couple……………………………………………………………………...12 III. 4 Puissance électromagnétique…………………………………………..…..12 III. 5 Rendement……………………………………………………………..…..13 III. 6 Machine à excitation constante………………………………………...…..13 IV. Modélisation de la machines à courant continu……...…………………………..14 IV. 1 Equations fondamentales……………………………………………...…...14 IV. 2 Equation mécanique…………………………………………………...…...14 IV. 3 Détermination de la fonction de transfert de la vitesse par rapport à la tension…………………………………………………………………………....14 V Conclusion…………………………………………………………………………....15 CHAPITRE II COMMANDE PAR MODELE INTERNE I. Introduction……………………………………………………………………….….17 II. Caractéristiques et propriétés de la IMC………………………………………….17 II.1 Synthèse de contrôleur IMC…………...…………………………………….19 III. Application de commande IMC au machine à courant continu………………..20 III.1 Modèle de la machine a courant continu……………………….…………..20 III.2 Mise en œuvre de la commande…………...……………………………… 20 III.3 Interprétation de résultats……………...…………………………………....23 IV. Conclusion…………………………………………………………………………..23 CHAPITRE III LES RÉSEAUX DENEURONES DÉFINITIONS ET PROPRIÉTÉS I. Introduction………………………………………………….………………………..25 II. Neurone biologique……………………………………………….………………….25 III. Neurone artificiel …………………………………………………….……………..26 III.1 Définition d’un neurone artificiel………………………………………...…26 III.2 Propriétés de réseaux de neurones………………………………………......28 III.3 Les différents types des réseaux de neurones…………………………...….28 III.3.1 Les réseaux de neurones non bouclés……………………….……28 III.3.2 Les réseaux de neurones bouclés ou récurrents…..........................29 III.4 Apprentissage……………………………………………………………….30 III.5 Perceptron multicouche et algorithme de rétro propagation………………..31 III.5.1. Définition……………………………………….......................…31 III.5.2. Principe……………………………………………………….......32 III.5.3 Algorithme de rétro propagation………………………………….33 IV. Modélisation des processus dynamiques par réseaux de neurones.………….….36 IV.1. Introduction………………………………………………………………...36 V.2 Principe de la modélisation…………………………………………………..36 IV.3 Modélisation par réseau de neurone………………………………………...36 IV.3.1 Le modèle neuronal direct………………………………………...37 IV.3.2 Le modèle neuronal inverse…………………………………….....38 V. Conclusion………………………………………………………………………...…39 CHAPITRE IV Commandes neuronales de MCC I. Introduction……………………………………………………………………......…41 II. Commande par modèle interne neuronal de processus…………………………..41 II.1 Introduction………………………………………………………………….41 II.2 Application de la commande par modèle interne neuronale sur la machine à courant continue………………………………………………………………….41 II.2.1 modèle neuronal direct.....................................................................42 II.2.2 modèle neuronal inverse…………………………………………...43 II.2.3 commande par modèle interne neuronal…………………………..45 III. Commande par modèle interne neuronal adaptative de processus……………..48 IV. Commande de processus par réseau de neurones récurrent…………………….52 IV.1 Réseau neuronal récurrent d’identification (Récurrent Neural Network Identifier RNNI)………………………………………………………………….53 IV.2 Réseau neuronal récurrent de contrôle (Récurrent Neural Network Contrôler RNNC)………………………………………………………………………...…55 IV.3 Simulations de commande par réseau neuronal récurrent………………….58 V. Interprétation des résultats………………………………………………………....62 VI. Conclusion………………………………………………………………………..…65 CHAPITRE V Réalisation Pratique I. Introduction…………………………………………………………………………..67 II. Commande en temps réel…………………………………………………………...67 II.1 Commande par modèle interne classique……………………………...…….68 II.2 Commande par modèle interne neuronal non adaptatif……………………..71 II.3 Commande par modèle interne neuronal adaptative………………………...74 II.4 Commande neuronale récurrente………………………………………...….76 II.5 Essais avec variation paramétrique………………………………………….79 II.6 Interprétation générale…………………………………………………...…..85 III. Conclusion………………………………………………………………...…85 Conclusion Générale………………………………………………………………....86 Bibliographie…………………………………………….…………………………….87 Annexe………………………………………………………………………………….89 Nomenclature ENIG Nomenclature f.é.m. E: force électromotrice. P: le nombre de paires de pôles. a: le nombre de paire de voies d’enroulement. N: le nombre de conducteurs (ou de brins-deux par spires). Φ: Flux maximum à travers les spires (en Webers-Wb). Ω : Vitesse de rotation (en rad.s-1). Ra: résistance rotorique. La: inductance rotorique. Rf: résistance statorique. Lf : inductance statorique. Ia: courant d’induit Pem: puissance électromagnétique Pm: puissance mécanique Cem : Le couple électromagnétique Cu : couple de pertes fer Cp : couple de pertes mécaniques) Pem : puissance électromagnétique h: rendement U: tension d’alimentation d’induit BBs: champ magnétique dans l’inducteur Ie : courant d’excitation Cv: Le couple de frottement visqueux f: frottement j: moment d’inertie Cr: couple résistive p: l’opérateur de Laplace IMC: Internal Model control MCC: Machine à Courant Continu Benmabrouk.Z & Abid.A 2006/2007 7 Introduction Générale ENIG Introduction Générale L’analyse et la synthèse de systèmes réels deviennent de plus en plus délicates lorsque la formulation du système en modèle mathématique n’est pas exacte et dans certains cas complexe. Cette complexité peut se présenter sous différents aspects tel que la non linéarité, la non stationnarité, des perturbations externes ou des dynamiques non modélisés. Lorsque la complexité augmente, les méthodes de modélisation et de commande classiques s’avèrent souvent incapables de présenter le comportement global des systèmes. Ainsi, de nouvelles techniques, sont apparues, à savoir les réseaux de neurones et la logique floue. Ces techniques peuvent fonctionner sur la base d’un ensemble de données numériques (entrée-sortie) du système. L’introduction des réseaux des neurones revient, essentiellement, à leur grande capacité d’adaptation de reproduire de comportement complexes et à leur potentialité d’amélioration continue de leur performance à travers un apprentissage dynamique. Notre projet s’inscrit dans le cadre de commande robuste de la machine à courant continu par deux techniques commande par modèle interne et commande neuronale. Le présent travail comprend cinq parties qui sont repartie de la façon suivante : Le premier chapitre est consacré à l’étude et la modélisation de la machine à courant continu. Le deuxième chapitre comprend la commande par modèle interne classique de la MCC. Des exemples de simulation achèvent ce chapitre. Le troisième chapitre présente une étude bibliographique sur les réseaux de neurones. En effet, la définition de ses modèles, leurs algorithmes d’apprentissage et leurs applications à la modélisation ont été traitées. Dans le quatrième chapitre, on s’intéresse à la présentation de la commande par modèle interne neuronal de type ’’feed forward’’ non adaptative et adaptative et le réseau de neurone récurent. Des exemples de simulation achèvent ce chapitre. La mise en œuvre pratique de la commande interne classique et neuronale fait l’objet du cinquième chapitre. Ce travail est clôturé par une conclusion générale et les perspectives envisagées. Benmabrouk.Z & Abid.A 2006/2007 8 Modélisation de la machine à courant continu ENIG CHAPITRE I MODÉLISATION DE LA MACHINE A COURANT CONTINU Ben mabrouk.Z & Abid.A 2006/2007 9 Modélisation de la machine à courant continu ENIG MODELISATION DE LA MACHINE A COURANT CONTINU I. Introduction Une machine à courant continu est une machine électrique. Elle permet la conversion bidirectionnelle d'énergie entre une installation électrique parcourue par un courant continu et un dispositif mécanique. Lorsqu'elle transforme de l'énergie électrique en énergie mécanique, on dit qu'elles fonctionnent en moteur. En revanche, si elle transforme l'énergie mécanique apportée par une autre machine en énergie électrique, on dit qu'elle fonctionne en génératrice. II. Structure de la machine à courant continu La machine à courant continu a une forme cylindrique constituée de deux parties principales. Le stator est la partie fixe du système. Il entoure la partie tournante, appelée rotor. Figure I.1 machine à courant continu. Le circuit bobiné sur le rotor et l'ensemble réalisant le collecteur est appelé induit. Dans la pratique, il est parcouru par un courant important. Le circuit qui est à l'origine de champ magnétique dans l'entrefer est appelé inducteur. Il est situé au stator. Il est parcouru par des courants (sauf dans la cas d'un inducteur à aimants permanents car il n'y a plus de bobinage inducteur). Ces derniers sont en général plus faibles que ceux de l'induit (excepté sur quelques machines particulières). La partie fixe, appelée stator, porte donc les éléments inducteurs (bobines parcourues par un courant continu ou aimants permanents), destinés à créer un champ magnétique [1,2]. Ben mabrouk.Z & Abid.A 2006/2007 10 Modélisation de la machine à courant continu ENIG III. Caractéristique de fonctionnement III. 1 Force électromotrice Nous savons qu’une bobine en mouvement dans un champ magnétique voit apparaître à ses bornes une force électromotrice (f.é.m.) donnée par la loi de Faraday. Sur ce principe, la machine à courant continu est le siège d’une f.é.m. E : . . E K = Φ Ω (I.1) Avec 2 P K a π = N (I.2) III. 2 Fonctionnement de la machine à courant continu Nous intéressons dan cette partie au uploads/Industriel/ commande-robuste-mcc.pdf
Documents similaires








-
105
-
0
-
0
Licence et utilisation
Gratuit pour un usage personnel Attribution requise- Détails
- Publié le Dec 21, 2022
- Catégorie Industry / Industr...
- Langue French
- Taille du fichier 1.9299MB