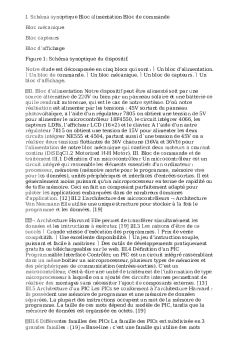

Chapitre ii nour I Schéma synoptique Bloc alimentation Bloc de commande Bloc mécanique Bloc capteurs Bloc d ? a ?chage Figure Schéma synoptique du dispositif Notre étude est décomposée en cinq blocs qui sont ?? Un bloc d ? alimentation ?? Un bloc de comma
I Schéma synoptique Bloc alimentation Bloc de commande Bloc mécanique Bloc capteurs Bloc d ? a ?chage Figure Schéma synoptique du dispositif Notre étude est décomposée en cinq blocs qui sont ?? Un bloc d ? alimentation ?? Un bloc de commande ?? Un bloc mécanique ?? Un bloc de capteurs ?? Un bloc d ? a ?chage CII Bloc d ? alimentation Notre dispositif peut être alimenté soit par une source alternative de V ou bien par un panneau solaire et une batterie ce qui le rendrait autonome qui est le cas de notre système D ? o? notre réalisation est alimenter par les tensions V sortant du panneau photovolta? que a l ? aide d ? un régulateur on obtient une tension de V pour alimenter le microcontrôleur F le circuit intégrer les capteurs LDRs l ? a ?cheur LCD ? et le clavier A l ? aide d ? un autre régulateur on obtient une tension de V pour alimenter les deux circuits intégrer NE et partant aussi d une tension de V on a réaliser deux tensions ottantes de V chacune Va et Vb pour l ? alimentation de notre bloc mécanique qui contient deux moteurs a courant continu DiSEqC Motorized H-H Motor III Bloc de commande et de traitement III Dé ?nition d ? un microcontrôleur Un microcontrôleur est un circuit intégré qui rassemble les éléments essentiels d'un ordinateur processeur mémoires mémoire morte pour le programme mémoire vive pour les données unités périphériques et interfaces d'entrées-sorties Il est généralement moins puissant qu'un microprocesseur en terme de rapidité ou de taille mémoire Ceci en fait un composant parfaitement adapté pour piloter les applications embarquées dans de nombreux domaines d'application III L ? architecture des microcontrôleurs ? Architecture Von Neumann Elle utilise une unique structure pour stocker à la fois le programme et les données C C ? Architecture Harvard Elle permet de transférer simultanément les données et les instructions à exécuter III Les raisons d ? être de ce succès ?? Grande vitesse d ? exécution des programmes ?? Prix de vente compétitifs ?? Une excellente disponibilité ?? Un jeu d ? instruction souple puissant et facile à maitriser ?? Des outils de développements pratiquement gratuits ou téléchargeables sur le web III Dé ?nition d ? un PIC Programmable Interface Contrôler un PIC est un circuit intégré rassemblant dans un même boitier un microprocesseur plusieurs types de mémoires et des périphériques de communication entrées-sorties C ? est un microcontrôleur c'est-à-dire une unité de traitement de l ? information de type microprocesseur à laquelle on a ajouté des circuits internes permettant de réaliser des montages sans nécessiter l ? ajout de composants externes III Architecture d ? un PIC Les PICs se conforment à l'architecture Harvard ils possèdent une mémoire de programme et une mémoire de données séparées La plupart des instructions occupent un mot de la mémoire de programme La taille de ces mots dépend du modèle de PIC tandis que la mémoire de données est
Documents similaires










-
29
-
0
-
0
Licence et utilisation
Gratuit pour un usage personnel Aucune attribution requise- Détails
- Publié le Fev 27, 2021
- Catégorie Heavy Engineering/...
- Langue French
- Taille du fichier 60.2kB