

SAINTES LES CAPTEURS DE POSITION ® Rémy PLUYAUT 2001-2002 1 Le contrôle du dépl
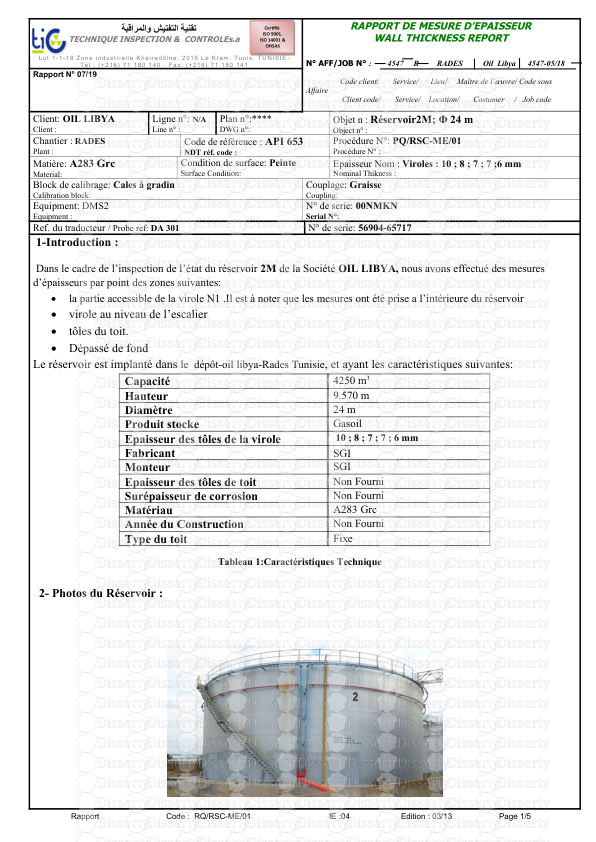
SAINTES LES CAPTEURS DE POSITION ® Rémy PLUYAUT 2001-2002 1 Le contrôle du déplacement et de la position d’un mobile est un problème couramment rencontré sur un grand nombre de systèmes automatisés. On doit donc utiliser différents types de capteurs. I Capteurs simples. 1.1 Principe utilisé. Ce sont des capteurs généralement basés sur la variation d’impédance d’un dipôle passif. La variation de la grandeur physique à mesurer peut-être liée a : • la variation de résistance (R en Ohm) d’un résistor ; • la variation de capacité (C en F) d’un condensateur ; • la variation d’inductance (L en H) d’une self. Ils existe aussi des capteurs basés sur la variation d’une mutuelle inductance (M en H) de deux selfs Rappel : La résistance en Ohms d’un conducteur s’écrit R=ρ.L/S avec : - ρ résistivité du matériau en Ω/m - L longueur du conducteur en m - S section du conducteur en m² 1.2 Capteurs résistifs. La piste résistive est placée sur la partie fixe du capteur et la partie opérative mécanique entraîne un curseur qui se déplace sur celle-ci. Ainsi, la résistance entre un point fixe et la partie mobile du potentiomètre est fonction de la position à mesurer L’élément sensible est constitué d’un support sur lequel et déposée une pâte résistive qui incorpore un liant plastique et du carbone (cas des capteurs à piste résistive) ou un bobinage résistif (cas des capteurs à fil résistif). Cet élément sensible peut être rapporté : - soit à l’intérieur d’une jupe cylindrique pour constituer un potentiomètre rotatif - soit fixé sur un support plat pour réaliser un capteur de déplacement rectiligne Ces capteurs sont très économiques, et d’une mise en oeuvre aisée. Ils sont donc très utilisés dans les applications courantes comme la détermination de la position d’un bras de robot. Remarque : Il existe des potentiomètres rotatifs à plusieurs tours. 1.3 Capteurs capacitifs. Pour faire varier la capacité d’un condensateur en fonction du déplacement, on fait varier: • soit la surface en regard des 2 armatures. • soit l’espacement e L’étendue de variation est faible. De l’ordre du millimètre pour la variation de l’épaisseur et de l’ordre du cm² pour la variation de la surface en regard. Les capteurs de pression utilisent ce principe pour mesurer le déplacement d’une membrane soumise aux forces de pression. Cours TS2 (Rémy PLUYAUT) Les capteurs de position 2 1.4 Capteurs inductifs. Un bobinage de fils conducteurs, parcouru par un courant électrique, créée un champ magnétique B. On peut canaliser les lignes de champs en ajoutant un circuit magnétique On peut écrire N.I= R. Φ • N nombre de spires • I courant dans les spires en A • R reluctance du circuit magnétique en H-1 • Φ flux du champ magnétique traversant les spires Si un noyau magnétique se déplace à l’intérieur d’une bobine, ce déplacement entraîne une variation de l’inductance de la bobine. On utilise ce principe dans les transformateurs différentiels (L.V.D.T.) : Le noyau magnétique cylindrique constituant l’élément sensible se déplace librement dans les bobines suivant leur axe commun. Il est prolongé par une tige reliée à l’objet mobile dont on veut mesurer le déplacement. Le déplacement du noyau autour de la position d’équilibre du pont génère deux tensions représentatives de l’amplitude ce déplacement et de son sens. La valeur de ce déplacement est obtenue par comparaison des valeurs crêtes de chaque signal. Nota: Le résolveur C’est un capteur rotatif, dont le fonctionnement se rapproche de celui du LVDT. Un rotor, alimenté en alternatif, induit des tensions alternatives sur des enroulements du stator. La valeur de la position du rotor est obtenue par comparaison des valeurs crêtes et des phases de chaque signal. Les capteurs inductifs de part leur légèreté et leurs frottements réduits, permettent de bonnes mesures dynamiques. Ils supportent de fortes températures et pressions. Leur durée de vie est importante. Ils sont utilisés en milieu fortement radioactif du fait d’une bonne fiabilité. II Codeurs rotatifs Un codeur rotatif est un capteur de position angulaire. Lié mécaniquement à un arbre qui l’entraîne, son axe fait tourner un disque qui lui est solidaire. Ce disque comporte une succession de parties opaques et transparentes. Une lumière émise par des diodes électrolumineuses, (DEL) traverse les fentes de ce disque et crée sur les photodiodes réceptrices un signal analogique. Une interface électronique (qui est inclue dans le codeur) amplifie ce signal puis le convertit en signal carré qui est alors transmis à un système de traitement. Cours TS2 (Rémy PLUYAUT) Les capteurs de position 3 II existe deux types de codeurs de position rotatifs : • Le codeur incrémental. • Le codeur absolu. 2.1 Le codeur incrémental. Les codeurs incrémentaux sont destinés à des applications de positionnement et de contrôle de déplacement d’un mobile par comptage et décomptage des impulsions qu’ils délivrent. Le disque d’un codeur incrémental comporte deux pistes La piste extérieure : (voie A ou voie A et B) est divisée en « n » intervalles d’angles égaux alternativement opaques et transparents, « n » s’appelant la résolution ou nombre de périodes ; c’est en effet le nombre d’impulsions qui seront délivrées par le codeur pour un tour complet de son disque. Derrière la piste extérieure sont installées deux photodiodes décalées qui délivrent des signaux carrés A et B en quadrature. Le déphasage de 90° électriques des signaux A et B permet de déterminer le sens de rotation : • dans un sens pendant le front montant du signal A, le signal B est à 1 • dans l’autre sens pendant le front montant du signal A, le signal B est à 0 La piste intérieure : (voie 2) comporte une seule fenêtre transparente. Celle-ci ne délivre donc qu’un seul signal par tour. Ce signal Z appelé «top zéro» dure 90° électriques et est synchrone des signaux A et B. Ce «top zéro» détermine une position de référence et permet la réinitialisation à chaque tour. L’utilisation d’un codeur incrémental nécessite une mise à zéro du codeur à sa mise sous tension. Fréquemment un traitement électronique (intégré au codeur) permet de délivrer des signaux complémentaires /A, /B, et /Z. • On dispose donc à la sortie du codeur incrémental de six signaux A, /A, B, /B, Z, /Z qui autorisent trois niveaux de précision d’exploitation : Utilisation des fronts montants de la voie A seule : Exploitation simple correspondant à la résolution du codeur. • Utilisation des fronts montants et descendants de la voie A seule : La précision d’exploitation est doublée. • Utilisation des fronts montants et descendants des voies A et B: La précision d’exploitation est quadruplée L’apparition des parasites en ligne peut perturber le comptage des impulsions délivrées par le codeur incrémental. En effet ces parasites seront parfois comptabilisés de la même façon que les impulsions délivrées par le codeur. Cours TS2 (Rémy PLUYAUT) Les capteurs de position 4 Toutefois, si le système de traitement est conçu pour pouvoir exploiter les différents signaux A, A, B, B, Z, Z délivrés par le codeur incrémental il sera possible de différencier les impulsions codeur des impulsions parasites évitant ainsi la prise en compte de ces dernières. 2.2 Le codeur absolu. Le disque de ce type de codeur comporte un nombre « N » de pistes ; chaque type a son propre système de lecture (diode D.E.L. et photodiode) • La première piste en partant du centre du disque est composée d’une moitiéopaque et d’une moitié transparente, la lecture de celle piste permet de déterminer dans quel demi-tour du disque on se situe. C’est la piste du MSB. • La piste suivante, en allant vers l’extérieur, est divisée en quatre quarts alternativement opaques et transparents. La lecture de cette piste, combinée avec la lecture de la piste précédente, permet de déterminer dans quel quart de tour du disque on se situe. • La piste suivante permet de déterminer dans quel huitième de tour on se situe, la suivante dans lequel seizième de tour on se situe. etc ... • La dernière piste, la plus extérieure, est la piste du LSB. C’est elle qui donne la précision finale du codeur appelée résolution. Si on appelle n le nombre de pistes, cette dernière piste comportera 2n points. on dira alors que le codeur a une résolution de 2n points par tour. Cours TS2 (Rémy PLUYAUT) Les capteurs de position 5 Au final, la lecture simultanée de toutes les pistes (n bits) donne un code binaire directement représentatif de la position du disque du codeur dans le tour. Le câblage d’un codeur absolu mobilisera donc n entrées du système de traitement (voies parallèles). Si plusieurs codeurs sont utilisés, le nombre d’entrées nécessaires du système de traitement peut devenir prohibitif. Pour remédier à cela, chaque codeur possède une entrée MX permettant de bloquer ses sorties quand l’unité de traitement émet un signal d’inhibition. Il devient alors possible de raccorder plusieurs codeurs sur les mêmes entrées de l’unité de traitement. Le seul codeur actif est celui qui ne reçoit pas le signal d’inhibition MX. Le code binaire délivré par uploads/S4/ 2codeurs-position.pdf
Documents similaires






-
185
-
0
-
0
Licence et utilisation
Gratuit pour un usage personnel Attribution requise- Détails
- Publié le Mar 30, 2021
- Catégorie Law / Droit
- Langue French
- Taille du fichier 2.4803MB