
CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 1 - Sciences Industriel
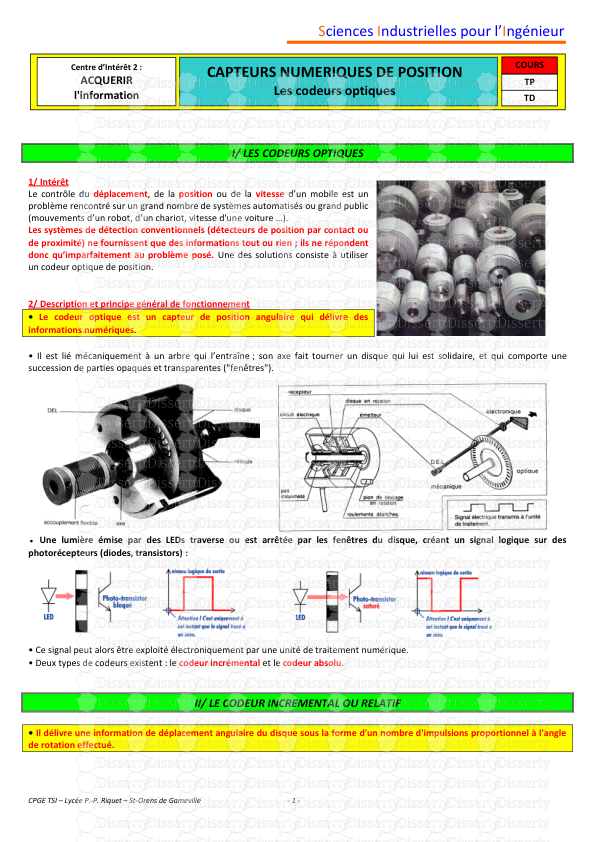
CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 1 - Sciences Industrielles pour l’Ingénieur I/ LES CODEURS OPTIQUES 1/ Intérêt Le contrôle du déplacement, de la position ou de la vitesse d’un mobile est un problème rencontré sur un grand nombre de systèmes automatisés ou grand public (mouvements d’un robot, d’un chariot, vitesse d'une voiture …). Les systèmes de détection conventionnels (détecteurs de position par contact ou de proximité) ne fournissent que des informations tout ou rien ; ils ne répondent donc qu’imparfaitement au problème posé. Une des solutions consiste à utiliser un codeur optique de position. 2/ Description et principe général de fonctionnement • Le codeur optique est un capteur de position angulaire qui délivre des informations numériques. • Il est lié mécaniquement à un arbre qui l’entraîne ; son axe fait tourner un disque qui lui est solidaire, et qui comporte une succession de parties opaques et transparentes ("fenêtres"). ● Une lumière émise par des LEDs traverse ou est arrêtée par les fenêtres du disque, créant un signal logique sur des photorécepteurs (diodes, transistors) : • Ce signal peut alors être exploité électroniquement par une unité de traitement numérique. • Deux types de codeurs existent : le codeur incrémental et le codeur absolu. II/ LE CODEUR INCREMENTAL OU RELATIF • Il délivre une information de déplacement angulaire du disque sous la forme d'un nombre d'impulsions proportionnel à l'angle de rotation effectué. Centre d’Intérêt 2 : ACQUERIR l'information CAPTEURS NUMERIQUES DE POSITION Les codeurs optiques TP COURS TD CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 2 - Sciences Industrielles pour l’Ingénieur • Le disque comporte au maximum 3 pistes : — 1 ou 2 pistes extérieures (A et B) divisées en 2n intervalles d’angles égaux, alternativement opaques et transparents ; n est la "résolution" ou le "nombre de points/tr" du codeur (c’est aussi le nombre de périodes/tr ou le nombre d’impulsions/tr). On choisit donc un codeur incrémental d'un nombre de points d'autant plus élevé que l'on veut une grande précision de mesure angulaire (200 à 10000 points/tr). Ex : On veut une précision de 0,1° On veut une précision meilleure que 0,38° — La piste intérieure (Z) comporte une seule fenêtre transparente. Il n’y a donc qu’1 impulsion/tr ; c’est le "top zéro". Il détermine une position de référence, permet la réinitialisation et le comptage des tours. • Derrière les pistes extérieures sont installés 2 photorécepteurs décalés qui fournissent des signaux carrés A et B en quadrature. Ce déphasage de 90° électriques permet de déterminer le sens de rotation : pendant le de A, B est à "1" ou à "0" : • Ce codeur nécessite un traitement particulier effectué par la partie commande : le comptage ou le décomptage des impulsions délivrées. La fréquence des signaux délivrés donne en plus la vitesse de rotation. III/ LE CODEUR NUMERIQUE OU ABSOLU • Chaque position du disque correspond à un code numérique, c'est-à-dire une valeur numérique codée en binaire sur n bits. • Le disque comporte n pistes ; le système de lecture comporte donc n LEDs et n photorécepteurs. — La 1ère piste (au centre) possède une moitié opaque et une moitié transparente. On peut donc déterminer dans quel ½ tour on est ; c’est la piste MSB ou "bit de poids fort". — La piste suivante, en allant vers l’extérieur, est divisée en 4 quarts alternativement opaques et transparents. On détermine donc dans quel ¼ de tour on se situe. — La piste suivante permet de savoir dans quel 1/8 de tour on est, la suivante dans quel 1/16 de tour, etc. — La piste extérieure est la piste LSB "bit de poids faible"). C’est elle qui donne la précision de la mesure, ou résolution. • La dernière piste comporte 2n zones noires ou blanches. Un tour de disque permet donc de coder 2n positions. La lecture simultanée de toutes les pistes donne un code binaire représentatif de la position angulaire du codeur dans le tour. Ce code comporte autant de bits que le codeur a de pistes : n bits. A B A B B A B A A en avance B en avance CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 3 - Sciences Industrielles pour l’Ingénieur • La résolution du codeur est donc de 2n points par tour (résolution angulaire = 360°/2n). On choisit donc un codeur absolu d'un nombre de pistes (bits) d'autant plus élevé que l'on veut une grande précision de mesure angulaire (les codeurs industriels comportent jusqu’à 24 pistes). Ex : On veut une précision de 0,1° On veut une précision meilleure que 0,38° • Codes délivrés et intérêt du binaire réfléchi sur le binaire naturel Le code binaire délivré par un codeur absolu peut être du binaire naturel ou du binaire réfléchi (code Gray). — En binaire naturel, il peut y avoir changement simultané de plusieurs bits d’une position à la suivante (ex : 001, 010 pour aller de la position 1 à la position 2). Si l’alignement des têtes de lecture n’est pas parfait, il y aura apparition d’un code erroné (ex : 001, 011, 010 pour aller de la position 1 à la position 2) ! — Le code Gray ne fait intervenir qu’un changement de bit à la fois dans sa progression (ex. sur 3 bits : 000, 001, 011, 010, 110, 111, 101, 100). Les codes erronés sont donc impossibles. En résumé : ● Codage du nombre de tours Un codeur absolu multi-tours possède un second disque qui permet d'indiquer le nombre de tours. Le nombre de bits en sortie est donc égal à la somme du nombre de bits pour coder la position dans le tour et du nombre de bits pour coder les tours. ● Raccordement à un automate Si le codeur doit être raccordé à un automate, l'étage de sortie sera choisi du type PNP si le commun des entrées de l'automate est au 0V (logique positive : "1" si 24V en entrée). Avantage Inconvénient Binaire naturel Directement utilisable par l’unité de traitement. Plusieurs bits changent d’un code au suivant si ces changements ne sont pas simultanés, il y a apparition de codes erronés (ex : 000, 001, 011, 010, 011). Binaire réfléchi (code Gray) Un seul bit change d’un code à l’autre pas de code erroné possible. Il faut effectuer un transcodage Gray binaire naturel pour exploiter le code. Sorties codeur CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 4 - Sciences Industrielles pour l’Ingénieur IV/ COMPARAISON DES DEUX TYPES DE CODEURS V/ EXEMPLES INDUSTRIELS 1/ Codeur incrémental 2/ Codeur absolu AVANTAGES INCONVENIENTS CODEUR INCRE- MENTAL • Conception simple, donc plus fiable et moins cher. • Au maximum 5 fils pour un codeur "de base" (+, –, A, B, Z). • Encombrement réduit. • Sensible aux coupures de courant : la position à la coupure est perdue et il faut réinitialiser le système (avec Z). • Sensible aux parasites : un parasite peut être comptabilisé comme une impulsion. • A et B peuvent avoir des fréquences élevées Le système de traitement doit être assez rapide, sinon il y a erreur. CODEUR ABSOLU • Insensible aux coupures de courant : l’information de position est disponible dès la (re)mise sous tension (d’où le nom d’"absolu"). • Le système de traitement n’a pas besoin d’être très rapide : si une information est sautée, la position réelle n’est pas perdue car elle sera valide à la lecture suivante. • Conception électrique et mécanique plus complexe plus cher. • Nombre important de fils peut monopoliser un nombre important d’entrées du système de traitement. CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 5 - Sciences Industrielles pour l’Ingénieur VI/ CALCULS DANS LES SITUATIONS LES PLUS COURANTES 1/ Rappel D’une manière générale, suivant que l’on spécifie la précision angulaire (en degré ou en radian) ou la précision linéique (en mètre), la résolution minimale (ou nombre de points par tour) du codeur est donnée par : p K.P N = Δx ou p 360 N = .K Δθ K : rapport de réduction entre l’axe du système et l’axe du codeur. P : conversion du mouvement de rotation en mouvement de translation. x (en m) ou (en degré) : précision recherchée. Np : résolution minimale ou nombre de points par tour du codeur. 2/ Exemple n°1 : système poulie courroie ; K = 1 Ici le codeur est solidaire de l’axe de la poulie, donc K = 1. On peut soit spécifier une précision angulaire désirée (en degré) ou linéique x (en mm par exemple). La transformation de mouvement est caractérisée par P = π.D (D = diamètre de la poulie). Si on spécifie la précision angulaire : p 360 N = Δθ Si on spécifie la précision linéique : p π.D N = Δx 3/ Exemple n°2 : système poulie courroie ; K ≠ 1 Ici entre uploads/S4/ les-codeurs-pdf.pdf
Documents similaires









-
82
-
0
-
0
Licence et utilisation
Gratuit pour un usage personnel Attribution requise- Détails
- Publié le Dec 20, 2021
- Catégorie Law / Droit
- Langue French
- Taille du fichier 1.0905MB