
Chapitre1 : Généralités . 1 Modélisation et Identification des Systèmes Dr : BO
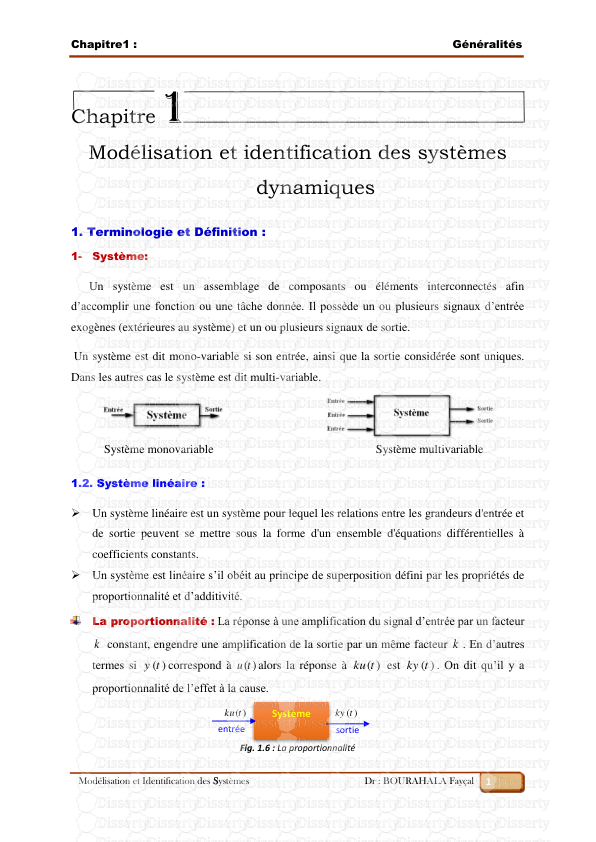
Chapitre1 : Généralités . 1 Modélisation et Identification des Systèmes Dr : BOURAHALA Fayçal Chapitre 1 Modélisation et identification des systèmes dynamiques 1. Terminologie et Définition : 1- Système: Un système est un assemblage de composants ou éléments interconnectés afin d’accomplir une fonction ou une tâche donnée. Il possède un ou plusieurs signaux d’entrée exogènes (extérieures au système) et un ou plusieurs signaux de sortie. Un système est dit mono-variable si son entrée, ainsi que la sortie considérée sont uniques. Dans les autres cas le système est dit multi-variable. Système monovariable Système multivariable 1.2. Système linéaire : Un système linéaire est un système pour lequel les relations entre les grandeurs d'entrée et de sortie peuvent se mettre sous la forme d'un ensemble d'équations différentielles à coefficients constants. Un système est linéaire s’il obéit au principe de superposition défini par les propriétés de proportionnalité et d’additivité. 3 La proportionnalité : La réponse à une amplification du signal d’entrée par un facteur k constant, engendre une amplification de la sortie par un même facteur k . En d’autres termes si ( ) y t correspond à ( ) u t alors la réponse à ( ) ku t est ( ) ky t . On dit qu’il y a proportionnalité de l’effet à la cause. Fig. 1.6 : La proportionnalité Système ( ) ku t ( ) ky t entrée sortie Chapitre1 : Généralités . 2 Modélisation et Identification des Systèmes Dr : BOURAHALA Fayçal L’additivité : Si les entrées 1( ),..., ( ) n u t u t entraînent respectivement les réponses 1( ),..., ( ) n y t y t alors l’entrée 1( ) ... ( ) n u t u t entraîne la réponse 1( ) ... ( ) n y t y t .( la sortie correspondante à la somme de plusieurs entrées est égale à la somme correspondant à chacune des entrées). .Fig. 1.7 : L’additivité - Les deux propriétés précédentes peuvent être étendue à des termes intégraux ou dérivés, donc aux systèmes dynamiques. Exemple d’équation différentielle : 1 0 (t) (t) (t) (t) y a y a y bu Cette équation peut être à coefficients constants ou à coefficients variables dans le temps : - Equation à coefficients constants ------- Système linéaire invariant dans le temps (LTI) - Equation à coefficients variables dans le temps ------- Système linéaire variant dans le temps (LTV) Système linéaire variant dans le temps (LTV): Un tel système peut être écrit sous forme : D’une ou plusieurs équations D’une fonction de transfert D’une représentation d’état ( ) x(t) Bu(t) y(t) Cx(t) Du(t) x t A Système linéaire invariant dans le temps (LTI): - Représentation par équation différentielle Soit u(t) et y(t) deux fonctions du temps (l’entrée et la sortie du système respectivement), Système Système 1( ) u t entrées sorties ( ) n u t 1( ) y t ( ) n y t 1 ( ) n i i u t entrée sortie 1 ( ) n i i y t Chapitre1 : Généralités . 3 Modélisation et Identification des Systèmes Dr : BOURAHALA Fayçal on note ( ) n n d y t dt la dérivée nème de la sortie y(t) par rapport au temps t Un système linéaire est régi par une équation différentielle à coefficients constants de la manière suivante : 1 0 1 1 1 1 1 1 1 0 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) n n m m n m n m n m n m d y t d y t dy t d u t d u t du t a a a a y t b b b b u t dt dt dt dt dt dt - n est l’ordre du système - u(t) : l’entrée - y(t) : la sortie - , i j a b sont des coefficients constants Solution de l’équation différentielle (application de la transformée de Laplace) En appliquant à l’équation différentielle d’ordre n la TL en considérant les conditions initiales nulles, En appliquant la propriété de dérivation, on obtient : 1 1 1 1 0 1 1 0 (p) (p) .... (p) (p) (p) (p) .... (p) u(p) n n m n n n m m a p y a p y a py a y b p u b p u b pu b Soit par factorisation 1 1 1 1 0 1 1 0 .... (p) .... (p) n n m n n n m m a p a p a p a y b p b p b p b u Ou encore 1 1 1 0 1 1 1 0 .... (p) (p) (p) (p) (p) .... m n m m n n n n b p b p b p b N y H D u a p a p a p a (p) : H Appelée fonction de transfert Entrée/Sortie 1.3. Système non linéaire : est un système dont le comportement n’est pas linéaire, c’est- à-dire soit ne satisfaisant pas le principe de superposition, soit la sortie n’est pas proportionnelle à l’entrée. Chapitre1 : Généralités . 4 Modélisation et Identification des Systèmes Dr : BOURAHALA Fayçal Ce type du système peut être représenté sous forme : - D’une équation différentielle : équation de Rycati 2 0 ay by cy d équation de Bernouli 0 ay by cy - D’une représentation d’état non linéaire ( ) ( ), ( ), ( ) ( ), ( ), x t f x t u t t y t g x t u t t Les systèmes non linéaires sont plus difficiles à étudier que les systèmes linéaires, néanmoins, en linéarisant (c’est possible) un système NL autour d’un point d’équilibre, ou d’une trajectoire, on obtient un système linéaire qui va présenter correctement le système non linéaire au voisinage de ce point d’équilibre ou cette trajectoire. 2. Modélisation ? : - Ensemble des procédures permettant d’obtenir un modèle - Modéliser un système = capable de prédire le comportement du système 3. Modèle - Un modèle est une structure mathématique pouvant représenter le système étudié. Cette structure doit comporter des éléments d'ajustement. - Description mathématique d’un processus réel. Classification de modèle : Selon le caractère des régimes de fonctionnement - Statique et Dynamique Selon la description mathématique - Linéaire, Non linéaire Selon les propriétés dynamiques - à paramètres localisés, à paramètres distribués Selon l’évolution des paramètres : - Stochastique, Déterministe Selon le nombre de variables : - Monovariable (SISO), Multivariable (MIMO) Chapitre1 : Généralités . 5 Modélisation et Identification des Systèmes Dr : BOURAHALA Fayçal 4. Procédure de modélisation Chapitre1 : Généralités . 6 Modélisation et Identification des Systèmes Dr : BOURAHALA Fayçal Modélisation des systèmes dynamiques 1. Représentation des systèmes dynamiques : 1.1. Représentation par Equation différentielle Exemple 1 : Système mécanique masse- ressort- amortisseur Il s’agit de modéliser un mouvement d’une roue par rapport au châssis par l’intermédiaire d’un amortisseur et un ressort. Ce système peut être représenté par une masse reliée en série à un ressort et un amortisseur monté en parallèle. Système masse- ressort- amortisseur On note ( ) f t la force exercée sur la masse M et ( ) y t la position de cette masse par rapport à l’équilibre. En appliquant le principe fondamental de la dynamique sur la masse M soumise à l’action du ressort ( ( ) Ky t ), de l’amortisseur ( ( ) dy t dt ) et à la force ( ) f t , on obtient l’équation suivante: 2 2 ( ) ( ) M K ( ) ( ) d y t dy t y t f t dt dt Exemple 2 : Considérons le circuit RLC suivant : Circuit RLC On veut déterminer la relation liant la tension d’alimentation ( ) e V t et la tension ( ) s V t . Pour des conditions initiales nulles, les équations électriques nous donnent: ( ) f t K M ( ) y t ( ) s V t ( ) e V t R C ( ) i t L Chapitre1 : Généralités . 7 Modélisation et Identification des Systèmes Dr : BOURAHALA Fayçal ( ) ( ) ( ) ( ) e s di t V t Ri t L uploads/s3/ mod-iden-2021.pdf
Documents similaires









-
164
-
0
-
0
Licence et utilisation
Gratuit pour un usage personnel Attribution requise- Détails
- Publié le Jui 05, 2022
- Catégorie Creative Arts / Ar...
- Langue French
- Taille du fichier 6.1667MB