

Identifier la Fonction Globale d’un système technique. Identifier les fonctions
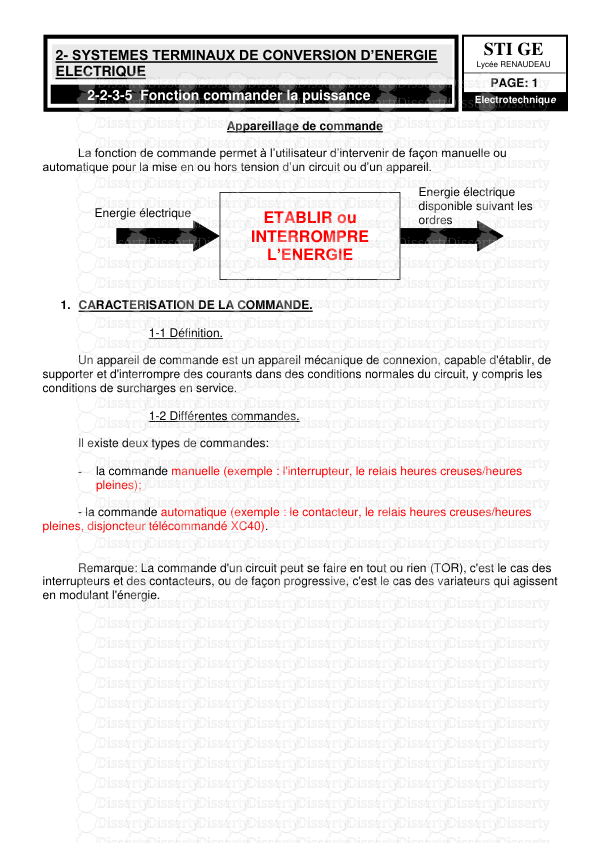
Identifier la Fonction Globale d’un système technique. Identifier les fonctions de service qui contribuent à la satisfaction de la FG. Le(s) processeur(s) M.O.S Sorties Secondaires M.O.E W C R E Fonction Globale A-0 ANALYSE FONCTIONNELLE D’ UN SYSTEME TECHNIQUE La modélisation d’un système technique « Rappels » Objectifs : I. Rappel : 1. Définition : Un Système Technique est un ensemble de composants ou constituants liés et organisés en fonction d’un but à atteindre. Selon le point de vue concepteur, un système technique est défini par un modèle fonctionnel. 2. Caractéristique : Modéliser un système technique revient à lui donner une représentation graphique qui met en évidence quatre ensembles d’éléments distinct les uns des autres mais cependant il existe une relation entre eux : Fonction globale : la fonction globale d’un système technique définit la transformation de la matière d’œuvre d’un état initial donné à un état final souhaité. Elle est exprimée par un verbe d’action à l’infinitif. Le(s) processeur(s) :(ST + Support) qui supporte la fonction globale. L a matière d’ œ u v r e : - MOE : C’est l’énergie, l’information, ou la matière sur laquelle agit le système. - MOS : C’est la matière d’œuvre d’entrée plus la valeur ajoutée. (V.A c’est la modification apportée à la matière d’œuvre après intervention du ST) Les données de contrôle : Elles représentent les contraintes qui permettent d’enclencher ou de modifier le fonctionnement du système. On a : - W (Energies): W.e, Wp, Wm. - C (Configuration): Programme. - R (Réglage): Température, vitesse, etc. …. - E (Exploitation) : données d’exploitation ou des consignes de fonctionnement. Les sorties secondaires : Elles sont : - Des informations (messages, compte rendus) - Des nuisances : (Déchets, bruit, chaleur…) 1. Construction du modèle : Activités de travaux pratiques : Compléter l’actigramme de niveau A-0 a- 1 Atelier des systèmes industriels A-0 A-0 b- c- 2 Atelier des systèmes industriels Système de désenfumage mécanique Moule injection plastique Tour parallele A partir d’un système technique et / ou de son dossier technique : Modéliser un système technique. Analyser le fonctionnement d’un système technique et/ou un sous-système par la méthode SADT. L’analyse descendante (SADT) Objectif : I I I I I – Analyse descendante : 1. Denomination: SADT : Structured Analysis and Design Technic ou IDEF0 (en anglais Integration Definition for Function modeling). 2- Définition : La modélisation d’un système dresse l’inventaire de ses relations externes mais ne permet pas une description approfondie capable de donner une idée claire sur l’agencement des sous- systèmes. Cette analyse, décrite par un modèle graphique, procède donc par approche descendante d’une manière que l’on va du plus général, au plus détaillé en s’intéressant aux activités du système ce qui permet de simplifier la compréhension de système pouvant être très complexe. Pour cela il faut décomposer la fonction Globale du système en modules fonctionnel (Boite). Ces modules pouvant être eux-mêmes décomposés progressivement par niveau apportant des Informations supplémentaires et permettant d’identifier les moyens et les activités utilisés pour réaliser la fonction globale. On obtient une analyse descendante, hiérarchique, modulaire, structurée. 3- Représentation graphique de la méthode SADT : Cela consiste à détailler le système en le divisant en sous-systèmes. On décompose ainsi le système, en niveau inférieur (0, 1,2,…). Le niveau 0 contient les boites 1, 2, 3… qui sont elles mêmes décomposé en boites 31,32, 33… pour la boite 3 et i1, i2, i3… pour la boite i et ainsi de suite en descendant les niveaux. Pour organiser la décomposition il existe une règle : une boite peut être décomposée et dans ce cas en minimum 3 autres boites et au maximum 6. De plus chaque flèche entrant ou sortant de la boite-mère doit se retrouver dans le diagramme 3 Atelier des systèmes industriels Plus détaillé A-0 : Boite mère A0 : Diagramme enfant de 1er niveau Fonction globale A-0 Plus Général enfant et doit être en relation avec au moins un enfant. Le diagramme ainsi obtenu ressemble au suivant : On ne dépasse que très rarement l'analyse de deux niveaux successifs, souvent A-0 puis A0. Exercice d’application 1 : Système technique : Sèche - cheveux 4 Atelier des systèmes industriels Commandes Air M R Air ambiant Ventilé Buse Alimentation Moteur Résistor Ventilateur (Hélice) 5 Atelier des systèmes industriels Sécher les cheveux A-0 W.E E : Ordre de fonctionnement Cheveux mouillé Cheveux sec Bruit Chaleur Sèche cheveux Ce système permet le séchage des cheveux mouillés par un courant d’air plus au moins chaud. Modélisation du système : R Réglage Travail demandé : On demande de compléter le niveau A0 en employant les termes suivants : Moteur – ordre de commande – chaleur – transformer l’énergie – guider l’air – réglage – résistor – ventiler l’air – bruit – Air ambiant (cheveux mouillé) – chauffer l’air – W.électrique - Air ventilé - Air ventilé chauffé et guidé (cheveux sec) – W mécanique – sèche cheveux – Air ventilé chauffé. Arrivée bac sale Retourner le bac + lavage Départ bac propre Jets d’eau bouillante Automate programmable Principe de lavage d’un bac A-0 Exercice d’application 2 : Système technique : LAVEUSE Ce système est utilisé pour laver les bacs, il est constitué d’une enceinte parallélépipédique qui protège l’environnement des projections d’eau et de vapeur, des portes manœuvrées par des vérins pour fermer et ouvrir l’enceinte, et d’un système de jets d’eau qui projette l’eau bouillante, pour laver les bacs. La commande de ce système est assurée par un automate programmable. Le système fonctionne selon le cycle suivant : 1- Amener le bac sale (Unité de transfert) 2- Retourner le bac (Manipulateur) 3- Laver le bac (Jet d’eau bouillante) 4- Retourner à nouveau le bac (Manipulateur) 5- Evacuer le bac vers la zone de déchargement (Unité de transfert) Travail demandé : Compléter l’actigramme de niveau A-0 et de niveau A0 du système Page-9- On demande de compléter le niveau A0 en employant les termes suivants : Ordre – Bac propre à l’endroit – Energie électrique – Déplacer le bac – Laver le bac – Information de situation du manipulateur – Gérer le système – Eau sale chaude – Bac sale à l’envers translaté – Laveuse - Energie pneumatique – Information de situation de l’effecteur – Consignes opérateur – Bac sale déplacé - Manipuler le bac – Eau propre bouillante - Programme – Information de situation du transfert d’amenée - Système jets d’eau –Automate programmable – Bac propre manipulé - Bac sale sur le transfert d’amené Page-10- C2 14 Clavie r L2 0 Pièce à percer M 2 Ecra n Moteur (Mt2) L2 1 m 1 2 P KM 2 Automat e Rampe d’arrivée de pièces Plateau tournant Pièce percée Mors de serrage (MS) L11 L10 Rampe d’évacuation 1 2 Moteur (Mt1) C 1 KM 1 M 1 1 4 Pièce percée et évacuée Exercice d’application 3 : Système technique : Unité automatique de perçage A- PRESENTATION DU SYSTEME : Ce système permet de percer de pièces métalliques il se compose de : - Rampe d’arrivée de pièces à percer (l’alimentation en pièce est assurée par la descente de celle-ci sous l’effet de la gravité à partir de la rampe d’arrivée vers le plateau rotatif). - Unité de serrage (Vérin C1 + mors de serrage). - Unité de perçage (Moteur Mt1 + Vérin C2). - Rampe d’évacuation des pièces percées. - Plateau tournant (Moteur Mt2 qui permet la rotation de 90° du plateau supportant les pièces à usiner) Tous les vérins sont alimentés par des distributeurs 5/2 à pilotage pneumatique. Page-11- A-0 NB : on suppose que le moteur (Mt2) de l’unité de perçage est toujours en rotation B- FONCTIONNEMENT : L’appui sur le bouton (m) de mise en marche et la présence de la pièce sur la rampe d’arrivé (capteur P) provoque le démarrage du système : - Blocage de la pièce sous le poste de perçage assuré par le vérin C1. - Descente de la tête de perçage par le vérin C2 pendant 7 secondes. - Remontée de la tête de perçage permettant un débourrage (évacuation des déchets) - Nouvelle descente de la tête jusqu'à la profondeur détectée par le capteur L11 - Remontée de la tête de perçage - Ejection de la pièce vers la rampe d’évacuation assurée par le moteur (Mt1) pendant le dernier quart de tour du plateau tournant. B- TRAVAIL DEMANDE : Compléter l’actigramme de niveau A-0 et de niveau A0 du système. Page-12- A-0 Exercice d’application 4 : Système technique : Un Poste automatique d'agrafage des caisses en carton I- Description du fonctionnement : L’appui sur le bouton de mise en marche (m) provoque le deépart du cycle de la façon suivante : -Deéplacement de la caisse jusqu'aà l’uniteé d’agrafage (Teête d’agrafage) par l’intermeédiaire du tapis (T). -La fermeture de la caisse par l’intermeédiaire des deux mors mobiles (Mm1+Mm2) actionneés par C1 et C2. -Descente de la teête d’agrafage graêce au veérin C3 pour l’agrafage de la caisse. -Le recul des deux mors mobiles pour libeérer la caisse. -L’eévacuation de la caisse uploads/Industriel/ analyse-fonctionnelle-tp.pdf
Documents similaires








-
104
-
0
-
0
Licence et utilisation
Gratuit pour un usage personnel Attribution requise- Détails
- Publié le Jui 22, 2022
- Catégorie Industry / Industr...
- Langue French
- Taille du fichier 0.8747MB